ARRI 摄影机稳定器系统|产品经理Curt亲自上手为您讲解 TRINITY 2 调平方法
为了进一步增加TRINITY系统在电影和电视中的分布和使用,我们开发了一种新的平衡TRINITY的方法,目的是将建立和平衡系统所需的时间减少到最低限度。
新方法将平衡过程分为四个单独的步骤:
1. 平衡下部橇板/平台。
2. 平衡TRINITY机头的俯仰轴(Tilt)
3. 平衡摄影机的16个空间位置
4. 平衡整个系统
这个新的流程和方法的优点是,前两个平衡步骤现在也可以在没有摄影机的情况下进行。例如,在实际拍摄前一天,摄影师或者助理可以在酒店或家里提前完成好相应的准备和调试工作,以减少在现场的准备和调试及等待的时间。
平衡下部橇板/平台
您首先需要准备一个新的TRINITY Skater工具。全新的TRINITY 调平工具 Skater 由一个坚固的底座支撑构成,同时底座上连接着两个轮子,这两个轮子都配备了超低摩擦滚珠轴承。
一旦TRINITY装备以水平位置放置在Skater上,用户现在可以提前确定将要使用的电池和安装的附件对装备平衡的影响程度。


TRINITY Skater工具
作为一种精确的测量仪器,用户可以看到电池和必要配件在橇板上的最佳位置和方式,以实现完美的重量分布和平衡。如果目前使用的轮子在长时间使用后出现凹痕,Skater上还有备用轮子可以随时替换。
以往的调平方式,我们更多是通过在摄影机上增加不同型号和数量的配重,来促使整套系统达到或趋向于一个相对的平衡状态,这无异于增加很多重量并耗费了一定的时间。
而现如今,一旦拥有了这个全新的调整工具TRINITY Skater,就允许我们将TRINITY的调平工作分为独立的几个部分,如底部的橇板/平台,上部的机头圈,以及摄影机部分,从而可以更加精确的独立控制每个部分的平衡状态,以及相应的减少配重的数量和所需要消耗的时间。
特别是在确保底部的橇板/平台的绝对平衡状态后,可以为摄影机及整套系统的调平降低难度并增加工作效率。
底部的橇板/平台的调平
以及TRINITY Skater工具使用介绍
第一步,我们需要再单独准备一个魔术腿/C-stand用于安装固定TRINITY Skater,与此同时,还需要再准备一条魔术绑带用于更好的固定住万向节的把手,如下图所示:

在开始下一步的调平工作之前,我们需要先考虑清楚你后续的拍摄需要装配哪些附件,如图传、电池的数量和大致位置、以及RCP-3是否要和主杆安装在一起等问题,因为这些因素你必须要提前设定好,然后再开展下一步的工作。
在确定好上述几个因素之后,下面你就需要将底部平台归位到居中状态,这包括前后和左右,得益于T2的全新设计,这一步可以免去使用工具,通过手部的触感和观察即可以快速的完成该模块部分的居中调节部分。

通过手部触碰边缘即可以判断模块是否处于居中位置
在完成模块居中调整之后,我们开始进行摆锤的设定。首先,将摆锤的摆动锁紧旋钮打开,然后将摆锤放置在停靠架上,通过重力的影响,摆锤会自然下垂,并完全垂直于地面。这样,我们就可以锁定摆锤的摆动锁紧旋钮,得到一个“居中状态”的摆锤,如下图所示

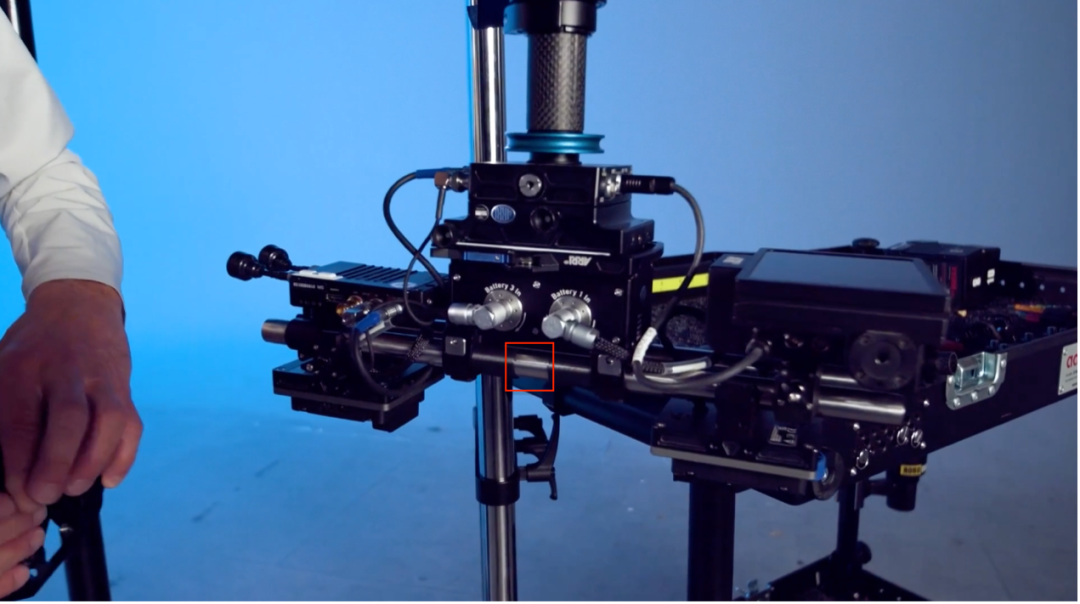
然后,我们需要做的就是将调整好的摆锤固定在橇板的中间位置(电源挂载架下方这一段内)。请记住,这一步很关键,你可以通过提前做标记来确保完美的中间位置,如下图中的红圈位置。
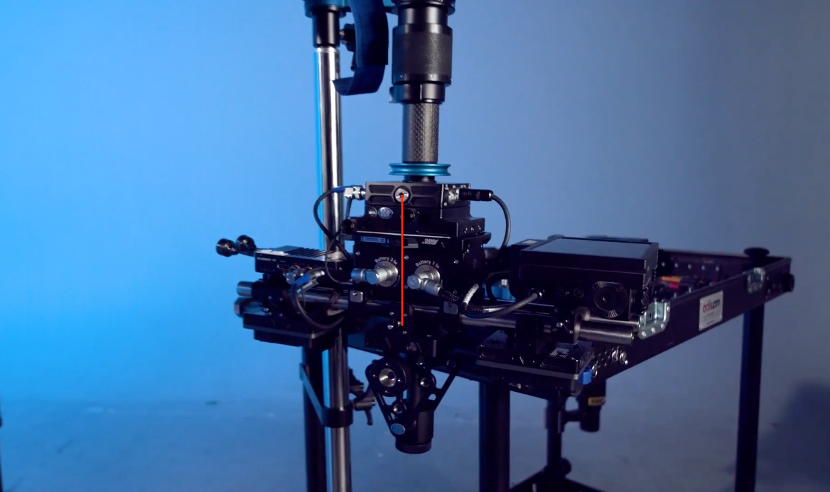
安装固定好之后,我们可以通过目测,给予两个位置的螺丝是否在一条线上(平台侧面中间的一颗银色可拆卸螺丝和摆锤上的一个固定螺丝孔,如下图红线所示),来判断我们的中间安装位是否完美。
完成以上步骤之后,我们就开始安装电池。值得注意的是,无论何种品牌及型号的电池,其重量都不是绝对对称的。通常来说,电池内部的电芯要短于/小于其外壳,加上电池内部电路板的结构和位置因素,所以我们稍后的调平,就要向大家展示,如何对这些影响因素做相应的调整和补偿。

接下来,我们就进入调平阶段。我们需要先将主杆小心的抬起,让TRINITY Skater的两个黑色轮子紧密的与TRINITY主杆上的蓝色锁紧环贴合在一起。

这里需要特别强调的是,一定是和蓝色的锁紧环贴合,而不是碳纤维主杆,因为后半段可伸缩碳纤维主杆上带有定位槽轨道,这将影响TRINITY Skater的正常工作,这点尤为关键。

除此之外,我们也要利用前文提及的魔术绑带对万向节把手进行固定(如下图红圈所示),以防止在后续的调之中出现万向节把手上下晃动的情况。

下面,我们就开始调节底部橇板/平台,我们要做的就是确保使之在水平、垂直以及左右各倾斜一定角度情况下,它都能处于平衡静止的状态,即“自然居中状态”。
水平静止

垂直静止

左右倾斜一定角度的静止
在上述过程成,你可能会遇到如下问题:
1. 整个橇板/底部平台出现明显大范围的向一层偏移
2. 在某个角度下,整个橇板/底部平台出现细微的偏移
对此,我们给出的解决方案是:
首先,请务必确保在调试开始之前,主杆内的供电主线不要露出导致晃动或是垂向地面,以及主杆的两节锁扣位置角度因为这些因素均会影响调平。

- 如果遇到明显的大范围偏移,在水平状态下,请尝试通过改变某一电池挂板位置或者整体左右移动19买mm支撑杆来改变左右重量的分配。
- 如果遇到细微的偏移,可通过如下步骤检查并将其修正:
A. 将一块电池进行180度方向调转安装来改变重量的分配调整,或是通过将电池挂板的供电插头从一侧调整到另外一侧。
B. 尝试通过改变主杆上的伸缩卡扣锁紧环的角度位置来修正细微的偏移,因为锁紧环卡扣位置的改变,会起到细微的重量分布改变。

按照上述教程调整,最终你将可以实现对橇板/平台的完美调平。同时,你也可以将摆锤取下,整个系统依然会保持稳定的平衡状态,这样做的目的是,你可以通过摆锤的安装和移除,来实现传统的TRINITY操作模式,以及“X-mode”模式,即两个模式之间可以快速的切换,而不再需要单独花费额外的时间进行系统的重新调平。
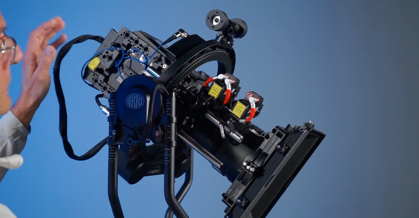
TRINITY机头圈的调平

首先,我们需要确保摄影机的安装位于机头圈的绝对中心位置,这方面我们可以通过机头圈底部安装板下方的左右位置刻度标示线来判定和调整底板是否居中。这也是后续调平TRINITY系统至关重要的步骤之一,我们需要确保摄影机绝对的居中安装。

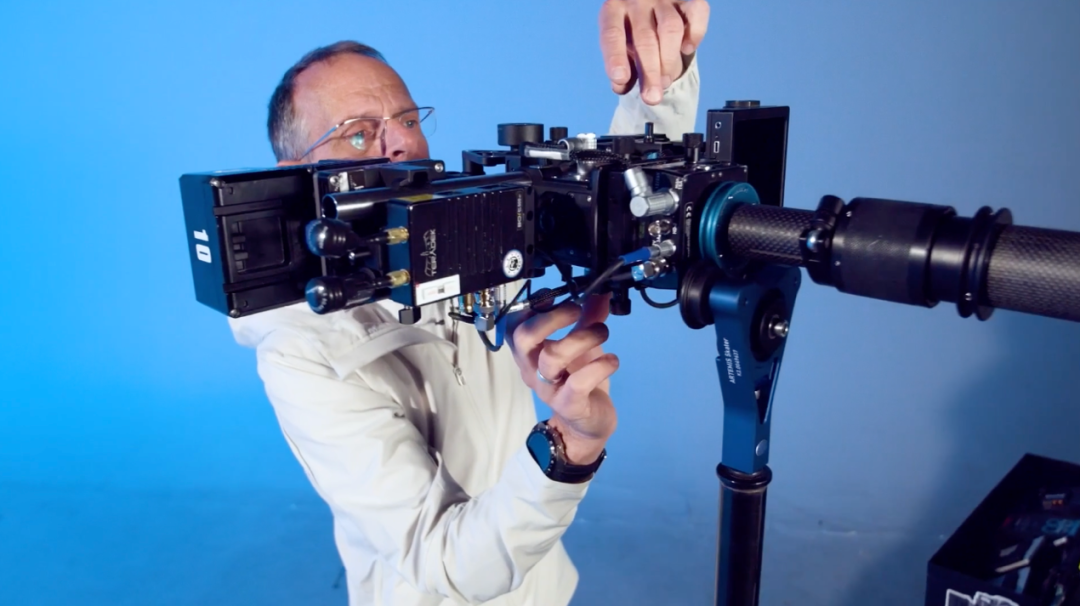
接下来,我们要做的就是要让机头圈在俯仰轴(Tilt)上能够处于静态居中,这其中包括垂直的居中位,以及任意俯仰角度位置。要完成这一步,我们需要在机头圈顶部增加一些配件和配重块来实现重量平衡的改变,这里我们推荐大家如下产品套装:

Trinity2 必备配件包,产品编号:KK.0049586

Trinity2 必备配件包安装后的效果图
这一步骤的目的是确保在安装摄影机之前,机头圈是出于一个绝对“自然平衡”的状态,以便在之后安装摄影机时出现的重心偏移,我们能够快速的进行判断和调整。
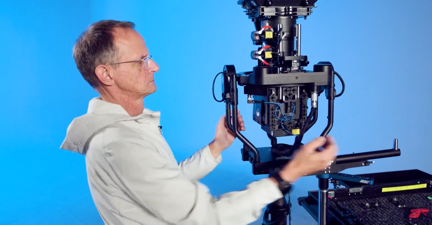
摄影机的安装调平
在上一章节,我们已经将TRINITY的机头圈调整到一个非常完美的自然平衡状态(Tilt俯仰轴),所以在机头圈处于Home(居中)位置时,在安装摄影机后,我们只需要前后滑动摄影机位置,来寻找到一个平衡点即可,检测的标准是摄影机不会出现明显的前倾或者后仰。
然后,我们再将机头圈分别向前、后倾斜45度,检查整个机头是否能处于自然静止状态。如果不能处于稳定的静止状态,则我们需要通过观察和判断,在机身前后,上下对应的位置增加配重块,以确保摄影机能够处于自然静止状态。
如果是使用体积较大、重量较重的镜头,我们的建议是通过在摄影机尾部加装电池来平衡前部偏沉的重量,而不是直接通过增加配重块的方式来抵消,因为安装在摄影机尾部的电池无论是体积还是重量亦或是重心点,都几本会处于摄影机的重心分布线上,这让调平会变得简单快速。反之,增加大量的配重块会带来很多不必要的麻烦。
在完成以上步骤调整之后,我们就可以进行最后的平衡状态检查。
在这里,我们引入了一组涵盖16个平衡位置的检测标准。

位置1

位置2

位置3
如果调平后的摄影机能在以上三个位置均能保持自然平衡的状态,接下来请手动旋转机头圈180度,即将摄影机上下翻转180度。

位置4

位置5

位置6
如果摄影机能在以上三个位置均能保持自然平衡的状态,接下来请继续手动旋转机头圈90度,即将摄影机竖立

位置7
位置8

位置9
如果摄影机能在以上三个位置均能保持自然平衡的状态,接下来请在当前位置,继续手动旋转机头圈180度,让摄影机形成一个竖立状态下的左右对调。

位置10

位置11

位置12
如果摄影机能在以上三个位置均能保持自然平衡的状态,接下来请将摄影机镜头朝上,让摄影机机身和机头圈底座相互成90度垂直,然后依次以90度角水平旋转摄影机达到如下4个点位(0点位置/3点钟位置/6点钟位置/9点钟位置)

位置13

位置14
位置15

位置16
如果摄影机能在以上4个位置依然均能保持自然平衡的状态,那么至此,机头的整体调平就算成功完成了。
最终的整体调平

前三章的内容我们向大家详细介绍了新的调平工具TRINITY Skater的使用以及如何将整套系统进行拆分调平。那么最后,我们将向大家讲解如何做好最终的整体调平工作。
在开始整体调平之前,我们首先要确保你此前调整好的底部平台没有其他人再动过,因为此前的调整将会作为整体系统调平的参照。这点至关重要,特别是在拍摄现场,因为会有很多不确定的因素,所以请特别注意这一点。
在确认以上内容之后,就可以进入最终的调整了。首先,松开摆锤的锁紧旋钮,让摆锤自然下垂与地面垂直,然后按下机头上的HOME复位键,让机头圈归到绝对零位,即HOME位置。
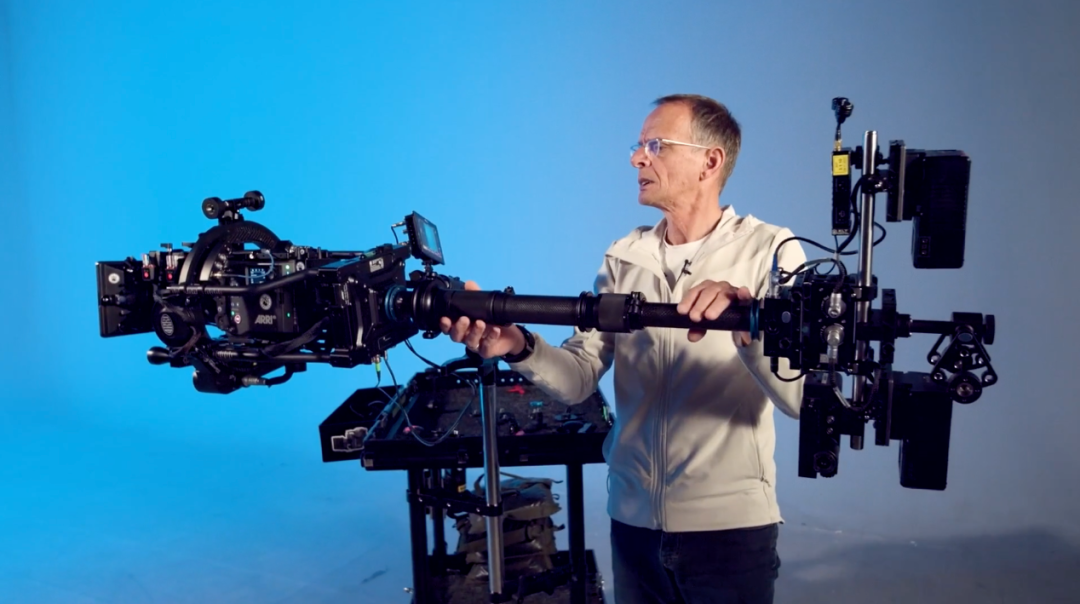
接下来,请将TRINITY打到水平,并通过改变主杆的长度使机头和底部保持重量相当,即满足TRINITY在此状态下能达到自然静止的水平状态。

我们在整体调平时,可参考机头上部的水平气泡柱进行参考。

可以明显观察到,机头产生了明显的左倾,这是因为我们在机头左侧加装了一个无线控制模块适配底座RAT-1。

为了抵消这个重量偏差,我们建议是在机头的另外一侧安装一个RMB-3(支撑轨支架),或是在此基础上在增加一截短的19mm支撑轨。因为我们不建议一上来就通过调节底部平台的侧向位移来去修正这个重量偏差。假设最后必须要通过底部平台的旋钮来去做最终的找平工作,我们也只是建议你将底部平台整体的侧向移动1-2毫米,如果你移动的范围超过了2毫米甚至3毫米,那么我们建议是你需要考虑的是通过在底部平台模块上的螺丝孔位上增加一点配重来平衡重量,而不是大范围的侧向移动整体。
调整好之后,我们也可以通过左右旋拧主杆进行摆动回中的测试,届时你会看到,左右回摆的速度是一致的,这说明我们此前的调节是成功的。
至此,我们就完成了TRINITY 2 的全部调平工作。
