你的相机或!许!有!色域!
学到的越多,就发现自己知道的越少。本期内容让你进一步发现自己知道得其实很少。
写完上一篇文章让我对色域有了一些新的发现,以下就跟大家讲一讲。
开始之前,如果你还没有看过我之前的文章,(别傻了,相机是没有色域的啊!)我觉得你应该去看一下,因为本期内容其实是上期内容的一些扩展,而不是总结。
-相机里的RGB:有个性的色域
色彩科学领域内可谓是百家争鸣。当中种种细节难以一一说明,涉及面也很广,而且对于色彩原理的理论也有很多。例如,有部分色彩科学专家就告诉过我相机其实是没有色域的,他们有的只是“光谱敏感度”,光谱敏感度内的信息处理后才会被转化为色域信息。在写完上一篇文章之后,有位色彩科学专家联系上我,跟我说其实相机应该是有本地色域的,但只是定义不怎么清晰。于是我自己做了一些图表希望能帮助大家理解。
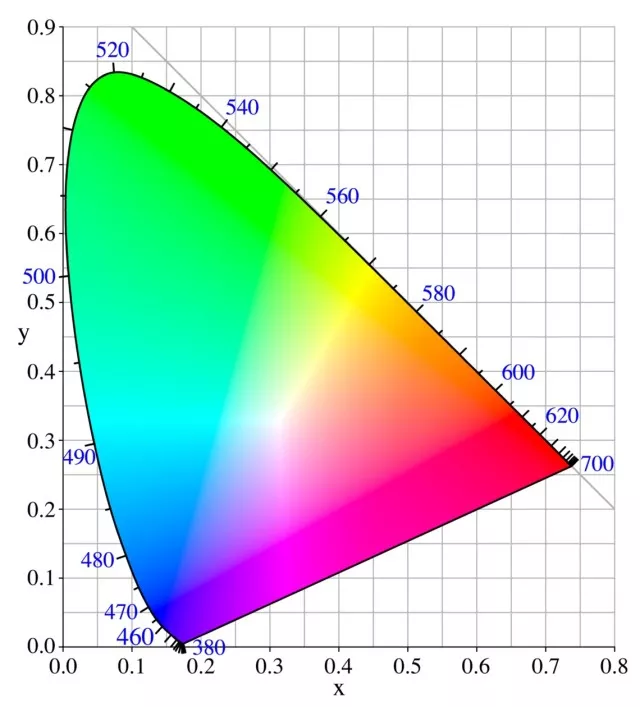
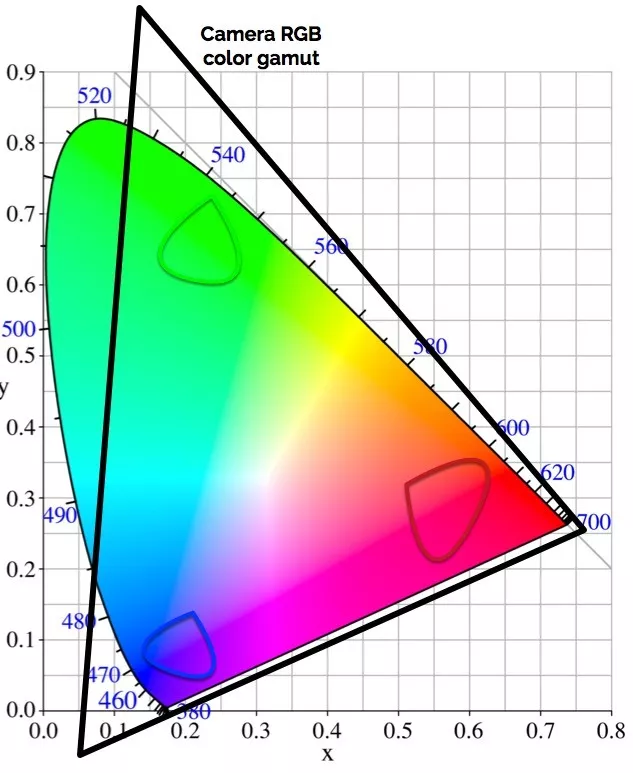
上图是国际照明委员会(Commission Internationale de L\\\'Eclairage,简称CIE)在1931年发布的一个表示人类视觉色域范围的图表。由于只能表示恒定亮度(约18%灰度)下的色相,所以这张图的意义其实不大,但为了求个方便我们就姑且用这张图吧。一般很多色域都会用一个包含在这个范围内的三角形子集(说人话:就是一个被这个图形包围的三角形)来表示。但你看清楚了,人眼视觉的色域范围根本就不是一个方方正正的三角形。
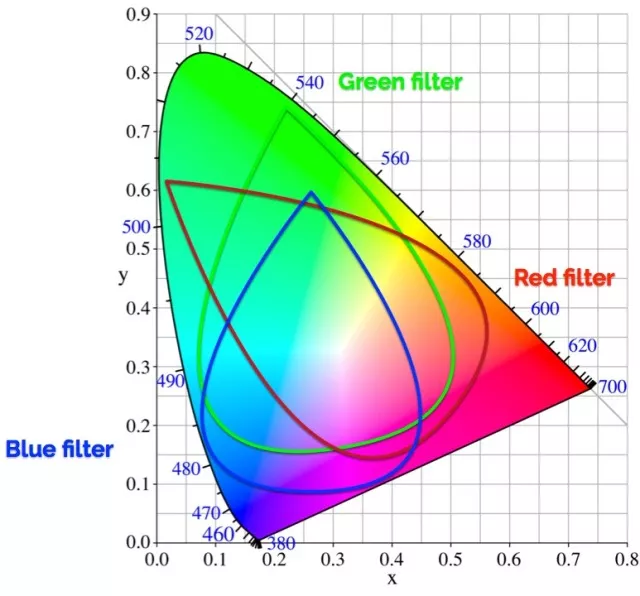
上面这个图是我尽全力画出来的,想用它来说明相机滤片的工作原理。虽说不是百分百准确,但我希望能传达出个大概的意思。
滤片的设计不是完美的,而且也并不追求完美:如果滤片没有重叠的话,相机除了纯红、纯蓝、纯绿以外就什么都记录不下来了。当中的奥秘在于,滤片色彩重叠的面积要大到让工程师可以编写尽可能多的混合色编码,但又不能多到每种颜色看起来都灰蒙蒙的糊成一片。例如要记录纯正饱和的红色,实际的景物所反射或发出的红色光线就要落在红色滤片范围内,并同时要保证在蓝色和绿色滤片范围外。
现在假设有一台相机的滤片像上面这张图一样,那它的质量真是令人堪忧,因为它是很难“看”得见紫色的,原因在于红色滤片和蓝色滤片的重叠范围基本上全都在绿色滤片里面,这样就会导致绿色泛滥,而相应地紫色的饱和度就会很低。其实在相机里头,不同颜色就是通过对三个基本色彩通道的增减来制造的。所以没有足够重叠空间就意味着相机会缺失对二次混合色和三次混合色的表现,而太多重叠空间就使得所有颜色都很浑浊。其实有没有想过相机的色彩运算矩阵其实是怎样起作用的?其实就是一个函数通过色彩增减把自然界的颜色塞进一个特定的色域里面。
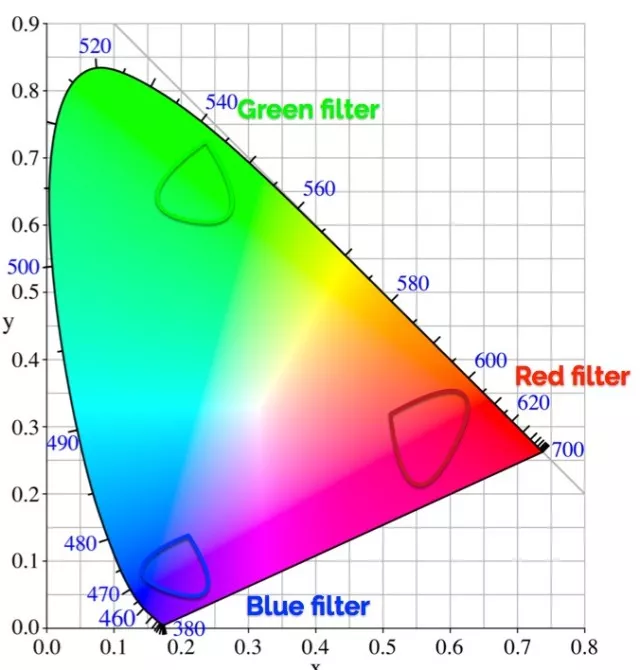
另外由于滤片过滤的颜色不是很纯,所以相机的原色端点常被想象成一片色彩“云”,而不是一个点。
相机的红色、绿色和蓝色端点都是一片片色彩区域,而不是一个特定的色相。因为要让端点落到一个特定的色相点上,那就要求滤片极为纯正,纯正到不会和其它的滤片有任何交叠,那么相机就能看到十分纯正的红、蓝、绿了,但代价就是除此之外其它任何东西都看不到。这问题就大了,因为现实世界中根本就没有什么东西是纯红色、纯蓝色或者绿色的。但退一步讲,定义色彩空间是一定要一个原色的。所以色彩科学专家所做的就是定义一个可以完全覆盖这些色彩区域的色彩空间,也就是给他们自己留有一些施展拳脚的空间。这样的一个色域是通过数学算法在电脑里面进行定义的。
再看上面这张图表,想象一下一台这样的相机,它的原色“云”是被他的色域所包含的,这个色域里面也包含了它理应记录的所有色相。如上图这么一台相机,有时是可以看到其色域之外的颜色的,但有时候也甚至看不到色域内的部分颜色。但都不打紧,这只是一个模型,在这个模型里,颜色就是通过对红绿蓝三个通道的刺激而表现出来。
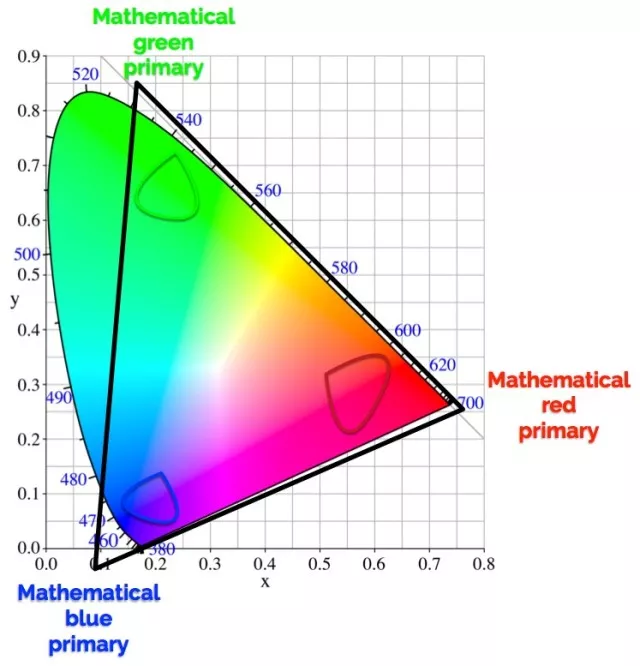
有时候这个色域会建造得比实际需要的更大,这样就可以更精准地复现颜色,否则的话某些颜色在还原的时候就会大打折扣,看下图:
上面这张图所用到的红蓝绿三个端点都是在真实世界不存在的,它把左边的边缘推向外面以容纳更多介于蓝色和绿色之间的饱和色相。
如上期内容所说:色彩空间就是色彩模型的基础上附加了一些可与其它事物相联系的条件,这些条件有白点参考,有伽马映射曲线以及一个能够稳定地将色彩和肉眼视觉联系起来的数学运算方式。这些数字通常会触及到一些肉眼无法看见的颜色,但这不代表这些颜色就存在在人眼中,这么做的意义是在于让色彩专家能够扩大工作色域,以容纳下尽可能多的可见色。这就是大家所知的“相机RGB”色域,每个厂商的“相机RGB”色域都不尽相同,甚至同厂商不同型号的相机都不一样。
这些原色端点的虚拟位置对相机的“视觉”有着很大的影响,因为它影响了不同色彩之间如何互相联系,也影响了色域的显示。
有得必有失,更大的色域也就说明码值会越大。如果色域太过广大,那么实际应用到的码值比例可能就占很小一部分。例如,一个色彩专家将红绿蓝的虚拟位置一直往外推,这个色域就能够记录很多颜色,但同时真的用上的码值可能只有50%。这就会造成相机运算力和后期处理中电脑运算力的浪费,而且当中包含太多过于接近的色相,其实对防止色带效应没有什么帮助。
所以在保证色域够大和保证码值高效不浪费中间存在一个很微妙的平衡点。例如,有一个色域每个通道包含16000(随便说的一个数字)个码值,但是真实世界里没有一个能够让任意一个通道的码值超过8000的色彩,那这部分多出来的色域代价就很大了,因为他们会使得相机的造价更高昂,另外图像文件的体积会更大。
每一台相机都有它自己独特的色域,是每一个色彩专家为其专门设计的,认清这一点十分重要。在这个基础上,每种颜色会被映射、偏移、微调,然后塞进其它色域里去(例如Rec 709,Rec 2020/2100,and DCI-3等等。)
但以上的种种,你都没办法从CIE发布的相机色域表现图看出来。
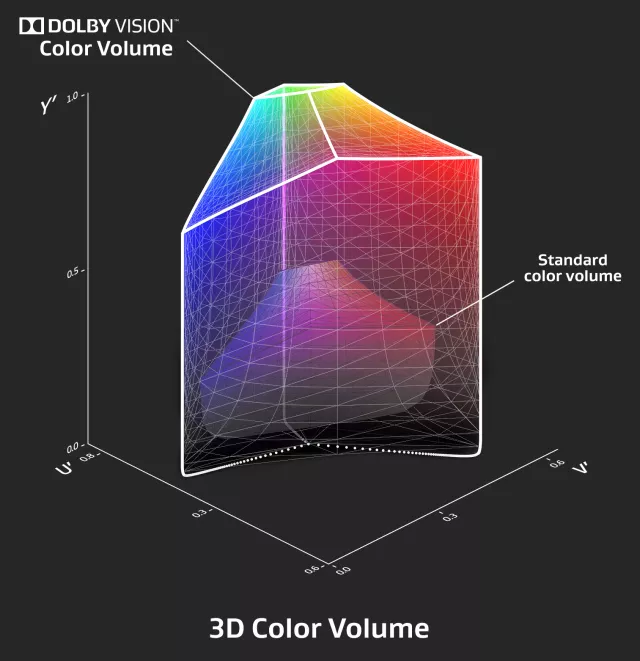
©2017 杜比色彩实验室
以上这张图我在去年一篇关于HDR的文章里面用到。这是一个SDR和HDR显示屏的对比图,但这不重要,我是想给大家看看色域实际上应该是怎样的。色域应该是一个三维立体,从黑延伸到白。在这个立体里面跟切蛋糕一样切下来一片二维图形,是没办法清楚表达一台相机或者一块显示屏的还原和表现能力的。
同时,各位也应该通过这张图意识到,要建立一个色域,并且将相机所有可能表现的颜色都包含进去,这件事情有多么的复杂。
-关于HDR的一点
之前和一个色彩专家聊天,他说到了HDR很有趣的一点——HDR比SDR多出来的那部分色域其实跟动态范围的关系要大于跟色域本身的关系。
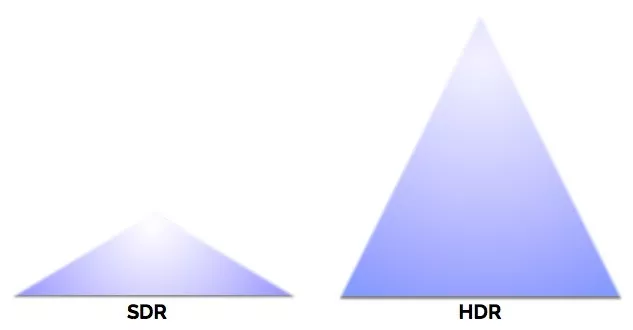
这张图粗略地表现了SDR和HDR两者能够表现的蓝色色相,从最高饱和度一直到白电平。SDR从中性灰到白电平之间只有大约2.4档的动态范围,所以没有多少灵活表达色彩的空间,高光也是被压缩得很严重。相反,HDR从中性灰到白电平之间有高达5档的动态范围,所以色彩表达的空间就很充足了。
但色相是能够很饱和同时又很亮的,这些色相大大地扩充了HDR显示设备的色域内容。HDR显示设备能够播放Rec.709,但由于动态范围增加了,所以效果看起来还是会很接近Rec.2020。
Rec.709标准里面已经包含了我们能在真实世界里面看到的大多数反射光的颜色了。
Rec.2020在这个基础上进行了一点扩充,我们只可能在动画画面或者饱和度调到11的实拍素材画面里才能看到这部分多出来的颜色。Rec.2100(其实就是Rec.2020加上高动态范围,其色域比Rec.2020大出许多)就将我们在真实世界里面能看到的动态范围和明暗对比引入到色彩标准里面。
-总结
以下几点很值得各位记住:
本质上讲,单片传感器的原色是一片由光谱信息组成的“云”。相机里面不存在特定的红绿蓝原色。
每台相机之所以有其独特的画面效果,部分原因在于色彩专家为其专门定义的色域。要定义色域包括定义它的原色端点(这些原色可能是真实颜色,也可能只是数学上的数值),选择原色来配合感光元件的优势,还有对色域进行取值,要涵盖尽可能多的颜色同时保证取值细致到能防止色带效应以及其他失真效果。
完成以上这些步骤之后,色彩专家就能专注于将色域内各种颜色转化到设施设备和投影仪常用的色彩空间里(Rec 709,Rec 2020/2100,DCI-P3)。
Art Adams
摄影指导
原文地址:http://suo.im/1pZAz6

写完上一篇文章让我对色域有了一些新的发现,以下就跟大家讲一讲。
开始之前,如果你还没有看过我之前的文章,(别傻了,相机是没有色域的啊!)我觉得你应该去看一下,因为本期内容其实是上期内容的一些扩展,而不是总结。
-相机里的RGB:有个性的色域
色彩科学领域内可谓是百家争鸣。当中种种细节难以一一说明,涉及面也很广,而且对于色彩原理的理论也有很多。例如,有部分色彩科学专家就告诉过我相机其实是没有色域的,他们有的只是“光谱敏感度”,光谱敏感度内的信息处理后才会被转化为色域信息。在写完上一篇文章之后,有位色彩科学专家联系上我,跟我说其实相机应该是有本地色域的,但只是定义不怎么清晰。于是我自己做了一些图表希望能帮助大家理解。
上图是国际照明委员会(Commission Internationale de L\\\'Eclairage,简称CIE)在1931年发布的一个表示人类视觉色域范围的图表。由于只能表示恒定亮度(约18%灰度)下的色相,所以这张图的意义其实不大,但为了求个方便我们就姑且用这张图吧。一般很多色域都会用一个包含在这个范围内的三角形子集(说人话:就是一个被这个图形包围的三角形)来表示。但你看清楚了,人眼视觉的色域范围根本就不是一个方方正正的三角形。
上面这个图是我尽全力画出来的,想用它来说明相机滤片的工作原理。虽说不是百分百准确,但我希望能传达出个大概的意思。
滤片的设计不是完美的,而且也并不追求完美:如果滤片没有重叠的话,相机除了纯红、纯蓝、纯绿以外就什么都记录不下来了。当中的奥秘在于,滤片色彩重叠的面积要大到让工程师可以编写尽可能多的混合色编码,但又不能多到每种颜色看起来都灰蒙蒙的糊成一片。例如要记录纯正饱和的红色,实际的景物所反射或发出的红色光线就要落在红色滤片范围内,并同时要保证在蓝色和绿色滤片范围外。
现在假设有一台相机的滤片像上面这张图一样,那它的质量真是令人堪忧,因为它是很难“看”得见紫色的,原因在于红色滤片和蓝色滤片的重叠范围基本上全都在绿色滤片里面,这样就会导致绿色泛滥,而相应地紫色的饱和度就会很低。其实在相机里头,不同颜色就是通过对三个基本色彩通道的增减来制造的。所以没有足够重叠空间就意味着相机会缺失对二次混合色和三次混合色的表现,而太多重叠空间就使得所有颜色都很浑浊。其实有没有想过相机的色彩运算矩阵其实是怎样起作用的?其实就是一个函数通过色彩增减把自然界的颜色塞进一个特定的色域里面。
另外由于滤片过滤的颜色不是很纯,所以相机的原色端点常被想象成一片色彩“云”,而不是一个点。
相机的红色、绿色和蓝色端点都是一片片色彩区域,而不是一个特定的色相。因为要让端点落到一个特定的色相点上,那就要求滤片极为纯正,纯正到不会和其它的滤片有任何交叠,那么相机就能看到十分纯正的红、蓝、绿了,但代价就是除此之外其它任何东西都看不到。这问题就大了,因为现实世界中根本就没有什么东西是纯红色、纯蓝色或者绿色的。但退一步讲,定义色彩空间是一定要一个原色的。所以色彩科学专家所做的就是定义一个可以完全覆盖这些色彩区域的色彩空间,也就是给他们自己留有一些施展拳脚的空间。这样的一个色域是通过数学算法在电脑里面进行定义的。
再看上面这张图表,想象一下一台这样的相机,它的原色“云”是被他的色域所包含的,这个色域里面也包含了它理应记录的所有色相。如上图这么一台相机,有时是可以看到其色域之外的颜色的,但有时候也甚至看不到色域内的部分颜色。但都不打紧,这只是一个模型,在这个模型里,颜色就是通过对红绿蓝三个通道的刺激而表现出来。
有时候这个色域会建造得比实际需要的更大,这样就可以更精准地复现颜色,否则的话某些颜色在还原的时候就会大打折扣,看下图:
上面这张图所用到的红蓝绿三个端点都是在真实世界不存在的,它把左边的边缘推向外面以容纳更多介于蓝色和绿色之间的饱和色相。
如上期内容所说:色彩空间就是色彩模型的基础上附加了一些可与其它事物相联系的条件,这些条件有白点参考,有伽马映射曲线以及一个能够稳定地将色彩和肉眼视觉联系起来的数学运算方式。这些数字通常会触及到一些肉眼无法看见的颜色,但这不代表这些颜色就存在在人眼中,这么做的意义是在于让色彩专家能够扩大工作色域,以容纳下尽可能多的可见色。这就是大家所知的“相机RGB”色域,每个厂商的“相机RGB”色域都不尽相同,甚至同厂商不同型号的相机都不一样。
这些原色端点的虚拟位置对相机的“视觉”有着很大的影响,因为它影响了不同色彩之间如何互相联系,也影响了色域的显示。
有得必有失,更大的色域也就说明码值会越大。如果色域太过广大,那么实际应用到的码值比例可能就占很小一部分。例如,一个色彩专家将红绿蓝的虚拟位置一直往外推,这个色域就能够记录很多颜色,但同时真的用上的码值可能只有50%。这就会造成相机运算力和后期处理中电脑运算力的浪费,而且当中包含太多过于接近的色相,其实对防止色带效应没有什么帮助。
所以在保证色域够大和保证码值高效不浪费中间存在一个很微妙的平衡点。例如,有一个色域每个通道包含16000(随便说的一个数字)个码值,但是真实世界里没有一个能够让任意一个通道的码值超过8000的色彩,那这部分多出来的色域代价就很大了,因为他们会使得相机的造价更高昂,另外图像文件的体积会更大。
每一台相机都有它自己独特的色域,是每一个色彩专家为其专门设计的,认清这一点十分重要。在这个基础上,每种颜色会被映射、偏移、微调,然后塞进其它色域里去(例如Rec 709,Rec 2020/2100,and DCI-3等等。)
但以上的种种,你都没办法从CIE发布的相机色域表现图看出来。
©2017 杜比色彩实验室
以上这张图我在去年一篇关于HDR的文章里面用到。这是一个SDR和HDR显示屏的对比图,但这不重要,我是想给大家看看色域实际上应该是怎样的。色域应该是一个三维立体,从黑延伸到白。在这个立体里面跟切蛋糕一样切下来一片二维图形,是没办法清楚表达一台相机或者一块显示屏的还原和表现能力的。
同时,各位也应该通过这张图意识到,要建立一个色域,并且将相机所有可能表现的颜色都包含进去,这件事情有多么的复杂。
-关于HDR的一点
之前和一个色彩专家聊天,他说到了HDR很有趣的一点——HDR比SDR多出来的那部分色域其实跟动态范围的关系要大于跟色域本身的关系。
这张图粗略地表现了SDR和HDR两者能够表现的蓝色色相,从最高饱和度一直到白电平。SDR从中性灰到白电平之间只有大约2.4档的动态范围,所以没有多少灵活表达色彩的空间,高光也是被压缩得很严重。相反,HDR从中性灰到白电平之间有高达5档的动态范围,所以色彩表达的空间就很充足了。
但色相是能够很饱和同时又很亮的,这些色相大大地扩充了HDR显示设备的色域内容。HDR显示设备能够播放Rec.709,但由于动态范围增加了,所以效果看起来还是会很接近Rec.2020。
Rec.709标准里面已经包含了我们能在真实世界里面看到的大多数反射光的颜色了。
Rec.2020在这个基础上进行了一点扩充,我们只可能在动画画面或者饱和度调到11的实拍素材画面里才能看到这部分多出来的颜色。Rec.2100(其实就是Rec.2020加上高动态范围,其色域比Rec.2020大出许多)就将我们在真实世界里面能看到的动态范围和明暗对比引入到色彩标准里面。
-总结
以下几点很值得各位记住:
本质上讲,单片传感器的原色是一片由光谱信息组成的“云”。相机里面不存在特定的红绿蓝原色。
每台相机之所以有其独特的画面效果,部分原因在于色彩专家为其专门定义的色域。要定义色域包括定义它的原色端点(这些原色可能是真实颜色,也可能只是数学上的数值),选择原色来配合感光元件的优势,还有对色域进行取值,要涵盖尽可能多的颜色同时保证取值细致到能防止色带效应以及其他失真效果。
完成以上这些步骤之后,色彩专家就能专注于将色域内各种颜色转化到设施设备和投影仪常用的色彩空间里(Rec 709,Rec 2020/2100,DCI-P3)。
Art Adams
摄影指导
原文地址:http://suo.im/1pZAz6
本文为作者 尊正数字视频有限公司 分享,影视工业网鼓励从业者分享原创内容,影视工业网不会对原创文章作任何编辑!如作者有特别标注,请按作者说明转载,如无说明,则转载此文章须经得作者同意,并请附上出处(影视工业网)及本页链接。原文链接 https://cinehello.com/stream/100635
尊正数字视频有限公司
点击了解更多
深圳市尊正数字视频有限公司是具有完全自主研发能力的,专注于涵盖从拍摄到传输的技术监视器产品的开发、生产和服务的世界知名品牌。成立以来,我们始终坚持以“真实色彩”为核心价值,将这一理念完美融合在硬件和软件的研发中,为用户提供极高性价比的革命性产品,引领中国视频行业与国际水平密切接轨。
扫码关注
尊正数字视频有限公司
尊正数字视频有限公司
